
Description
Unmanned aerial vehicles (UAV) are used primarily used in surveillance and control of maritime traffic, construction surveillance, detection and control of coastal hazards, flood monitoring, terrain mapping, fire disasters, remote data acquisition of existing pavement conditions, earthquake damage assessment, and post distress monitoring survey. UAV’s come with high-quality cameras and a global navigation satellite system – making it possible to collect survey-grade data and develop 3D models which can be used be to access pavement distress, rock-cut stability assessment, stockpile volume determination.
Specifications
Operating Temperature -4° to 113° F (-20° to 45° C)
IP Rating – IP43
GNSS – GPS and GLONASS or GPS and BeiDou
RTK system – Built-in DJI D-RTK for accurate heading data for positioning
Vision and Infrared Sensing System –
- Forward – 2.3-98.4 feet (0.7-30 m), FOV – Horizontal: 60°; Vertical: 54°
- Download – 0.33-16.4 feet (0.1-5 m)
- Upward – 0-16.4 feet (0-5 m) FOV – ±5°
Max Service Ceiling Above Sea Level: 3000 m
Gimbals ( Zenmuse Z30)
- Single Downward Gimbal
- Dual Downward Gimbals,
- Single Upward Gimbal
Maximum Transmission Distance: 2.4 GHz: 4.3 mi / 7 km 5.8 GHz: 4.3 mi / 7 km
Hovering Accuracy (GPS Mode)
- Vertical: ±1.64′ / 0.5 m (±0.33′ / 0.1 m, with Downward Vision System enabled)
- Horizontal: ±4.92′ / 1.5 m (±0.98′ / 0.3 m, with Downward Vision System enabled)
Sensor 1/2.8” Effective pixels:2.13 M
Lens FOV: 63.7°(Wide) – 2.3°(Tele)
ISO Range 100-3200 (video) 100-1600 (photo)
Shutter Speed 1/30 – 1/6000 s
Still Photography Modes: Single shot, Burst shooting: 3/5 frames, Interval (2/3/4/7/10/15/20/30 sec)
Flight time: 23 minutes and 32 minutes with TB50 and TB55 battery respectively
Weight: 6.14 kg
Repositioning of Images:
- Loki operates in Post-Processed Kinematic (PPK) mode
- Provides centimeter-level estimates of the camera exposure stations for downstream processing by third party point cloud generation software.
- Septentrio AsteRx-m2 Global Navigation Satellite System (GNSS) engine
Applications
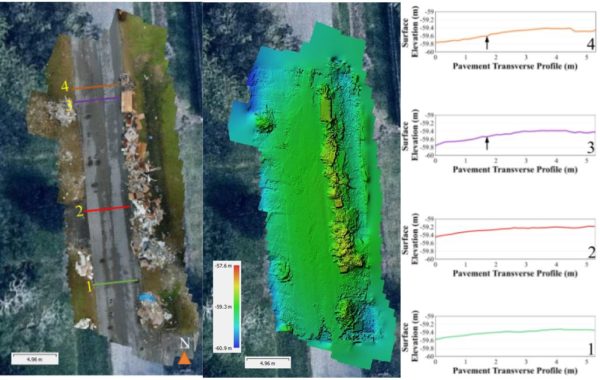
Pavement Crossection using UAV-CRP – identify abrupt changes in the elevation of the pavement.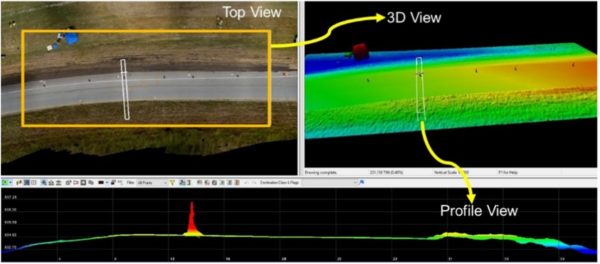
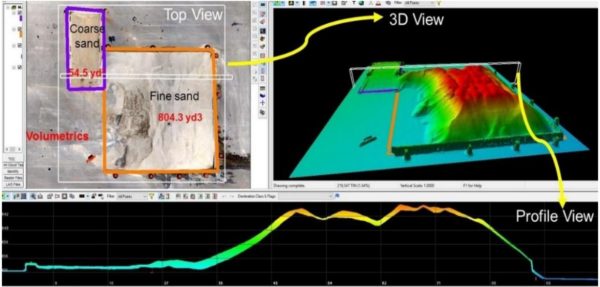
Two stockpiles surveyed at a flight altitude of 22.9 m (75 ft) above ground level (AGL) using UAV-CRP technology.
Publications
- Congress, Surya Sarat Chandra, Anand J. Puppala, Aritra Banerjee, and Ujwalkumar D. Patil. “Identifying hazardous obstructions within an intersection using unmanned aerial data analysis.” International Journal of Transportation Science and Technology (2020).
- Puppala, Anand J., Surya SC Congress, Nagasreenivasu Talluri, and Ekarin Wattanasanthicharoen. “Sulfate-heaving studies on chemically treated sulfate-rich geomaterials.” Journal of Materials in Civil Engineering 31, no. 6 (2019): 04019076.
- Congress, Surya Sarat Chandra, and Anand Jagadeesh Puppala. “Evaluation of UAV–CRP data for monitoring transportation infrastructure constructed over expansive soils.” Indian Geotechnical Journal (2019): 1-13.
- Puppala, Anand J., and Surya Sarat Chandra Congress. “A Holistic Approach for Visualization of Transportation Infrastructure Assets Using UAV-CRP Technology.” In International Conference on Information technology in Geo-Engineering, pp. 3-17. Springer, Cham, 2019.
- Congress, Surya SC, Anand J. Puppala, and Cody L. Lundberg. “Total system error analysis of UAV-CRP technology for monitoring transportation infrastructure assets.” Engineering Geology 247 (2018): 104-116.
- Puppala, Anand J., Surya SC Congress, Tejo V. Bheemasetti, and Santiago Caballero. “Geotechnical data visualization and modeling of civil infrastructure projects.” In GeoShanghai International Conference, pp. 1-12. Springer, Singapore, 2018.
- Puppala, Anand J., Surya SC Congress, Tejo V. Bheemasetti, and Santiago R. Caballero. “Visualization of civil infrastructure emphasizing geomaterial characterization and performance.” Journal of Materials in Civil Engineering 30, no. 10 (2018): 04018236.